
Technical Whitepaper
GNSS-Free Positioning for UAV Operations in Denied Environments
Skyat is a UAV peripheral that provides robust global position estimation without Global Navigation Satellite Systems (GNSS). It combines satellite map matching, onboard vision, inertial sensing, and motion-model constraints for continuous navigation.
Document version: 1.0 | Date: 2026-05-16
Overview of Skyat
Skyat is a peripheral device that integrates with UAVs to enable GNSS-free global positioning. It increases UAV autonomy in GNSS-denied environments without additional infrastructure and augments surveillance and situational awareness capabilities.
Key Features
Direct Integration
Skyat presents itself as a GNSS peripheral. Platforms that support the MAVLink and NMEA protocols, such as PX4, ArduPilot, AuterionOS, and MicroPilot, can ingest Skyat position estimates through the GNSS input.
Low Power Requirements
Skyat consumes 15W during normal operation and up to 30W during peak usage. Typical draw is about 1A at 18.5V.
Lightweight Design
Skyat weighs approximately 350g, making it easy to integrate with different UAV platforms without significantly affecting payload capacity.
No Ground Infrastructure Required
Skyat is a standalone device. When added to a UAV, it does not require any external communication outside the host aircraft.
Understanding the Threat of GNSS Vulnerability
Global Navigation Satellite Systems (GNSS) are a core enabler of modern drone localization and navigation, providing positioning data essential for autonomous flight and waypoint navigation[1]. These signals travel from space, and they arrive at Earth's surface as extremely weak radio signals.
The low-power nature of GNSS signals makes them susceptible to jamming. Readily available jamming devices can overpower these signals, creating a bubble of interference. Such a bubble can lead to:
- Loss of UAV positioning
- Drift and instability
- Forced landing or crash
A more sophisticated form of interference is GNSS spoofing, in which a malicious actor broadcasts fake GNSS signals. These deceptive signals can be difficult to detect and isolate. Spoofing can lead to:
- Deviation from flight path
- Execution of malicious commands
Understanding Alternative Navigation Methods
As GNSS interference becomes more common, alternative positioning, navigation, and timing (PNT) technologies are gaining importance[2]. These technologies do not replace GNSS, but complement it or provide redundancy.
Inertial navigation systems (INS) are the most common alternative, using inertial measurement units (IMUs) to estimate a UAV's positioning, navigation, and timing (PNT) from a known starting point. INS perform well over short distances but accumulate drift over longer flights. This drift can be reduced with vision-based methods such as visual inertial odometry (VIO)[3], which combines onboard camera imagery with IMU data to estimate movement and position.
One advantage of VIO is that it can operate with relatively cheap cameras. Although the computational cost is high, compact and affordable single-board computers (SBCs) now make it practical on lighter UAVs. Its main limitation is that errors in visual feature extraction can cause a complete loss of positioning, reducing its reliability in operational use.
Comparison of INS, VIO and additional methods is provided in the table below.
| Method | Strengths | Weaknesses |
|---|---|---|
| Inertial Navigation (INS) | Independent operation. Ubiquitous, UAVs are already fitted with IMUs. | Very high drift rate. Requires initial calibration. |
| Visual Inertial Odometry (VIO) | Good accuracy. Cost effective, works with relatively cheap cameras. | Moderate scale drift. Environment and light dependent. Computationally expensive. |
| LiDAR based Navigation | High accuracy and robustness. | Economically expensive. Heavy payload. Limited altitude range. Some environmental dependence. |
| Radio Navigation or Cellular Positioning | Existing infrastructure. Limited computational cost. | Limited coverage/range. Infrastructure dependent. May suffer from high latency. |
How does Skyat work?
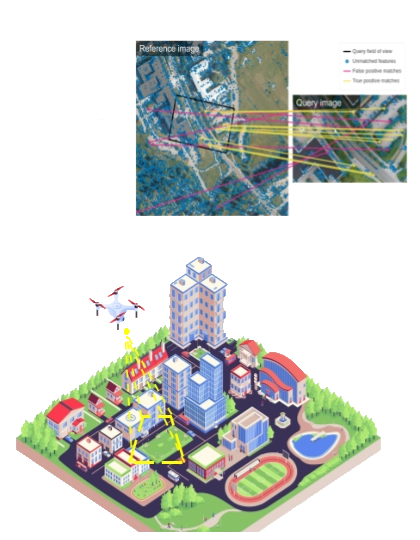
Skyat visually matches in-flight video feeds against preloaded geospatial data (orthographic imagery and digital surface models) to estimate an absolute global position. In parallel, Visual Inertial Odometry (VIO) [3] provides relative position estimates between map matches. These absolute fixes correct the drift that accumulates in VIO, addressing its main limitation.
When map matching is temporarily unavailable, Skyat continues estimating position using IMUs, visual odometry, and dead reckoning until the next absolute fix is established. During these relative-only intervals, it tracks the expected growth in drift and updates its error estimate accordingly.
Skyat is a standalone device that requires no external communication beyond the host UAV. Positioning can operate fully offline, while surveillance data can support autonomous missions or be sent to the operator through the UAV's communications link.
Device Specifications
Baseline hardware and interface specifications for integration planning.
Validation Summary
Skyat has been evaluated through flight campaigns to characterize behavior across representative mission profiles and terrain classes.
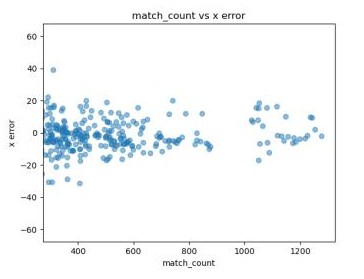
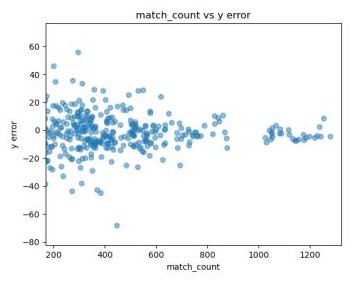
The following shows a sample flight from a recent campaign in Kuhmo. The left image shows the flight path, while the other two show the number of absolute map matches Skyat found against geospatial data and the resulting easting (X) and northing (Y) position errors in meters. The flight lasted 20 minutes at an altitude of 100 m above ground level. The route covered a mix of well-featured semi-urban areas and more challenging, feature-poor natural terrain.

The video below shows Skyat (yellow) following the position of the UAV and leaving behind a yellow trail of mock GNSS position estimates.
The complete demo can be viewed here Skyat - Reveal Demo.
References
Independent research cited in this document.
- [1] From GPS to AI: A comprehensive review of Unmanned Aerial Vehicle (UAV) localization solutions https://doi.org/10.1016/j.isprsjprs.2025.09.014
- [2] Protecting GNSS receivers from jamming and interference https://ieeexplore.ieee.org/document/7444136
- [3] Visual-Inertial Navigation: A Concise Review https://doi.org/10.1109/ICRA.2019.8793604
Contact
For technical discussion, demos, or deployment planning, reach out directly.